[SUTD Option Studio, 2019]
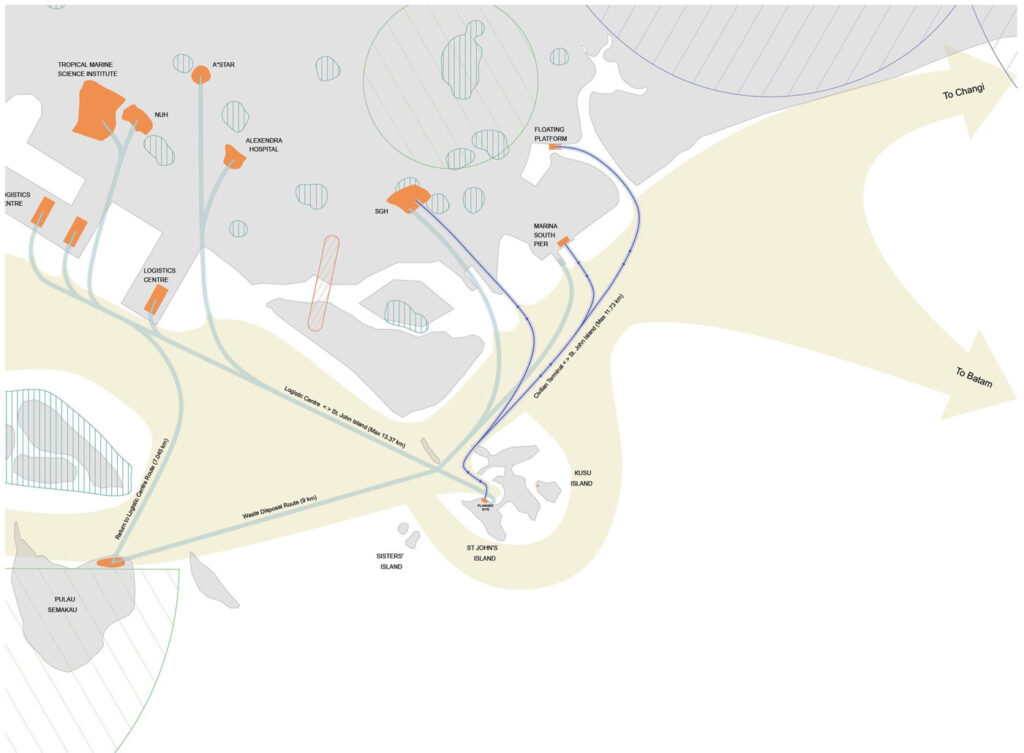
Singapore may be among the first countries to implement a viable drone delivery system. The Singaporean drones, however, will not be dropping into the voluminous backyards of American suburbia – instead they will be crossing nearby seas to deliver packages to freighter ships (an Airbus project) and to Pulau Ubin (a Singapore Post project).
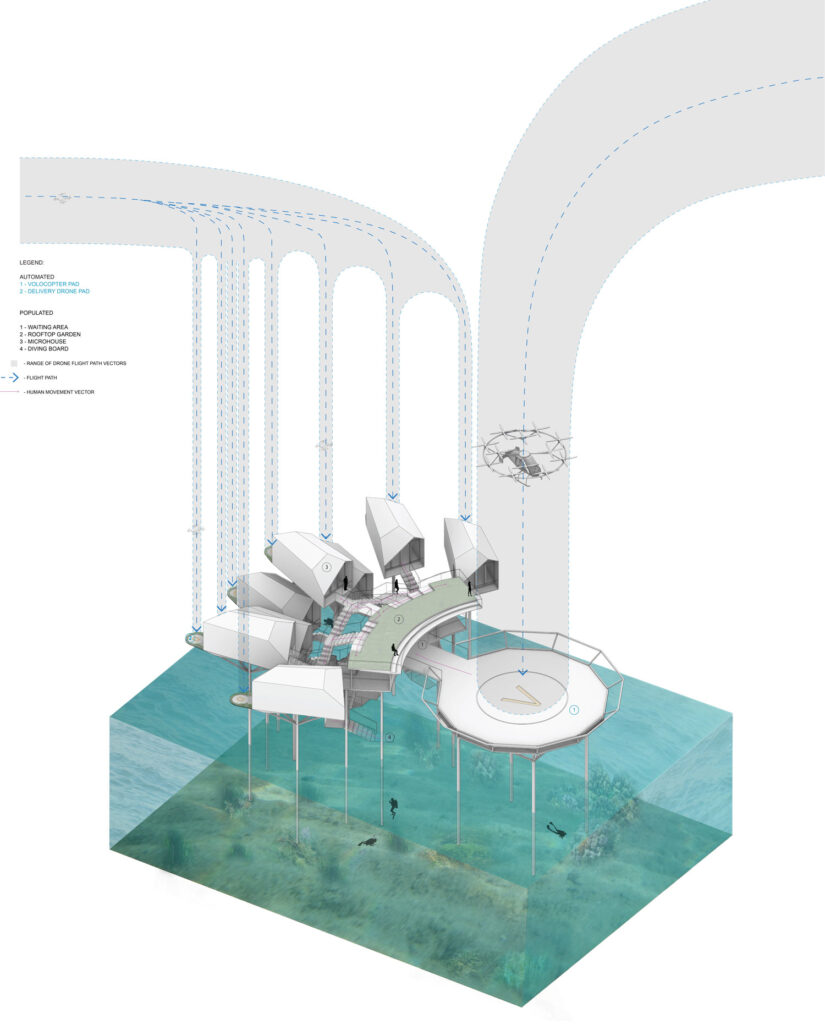
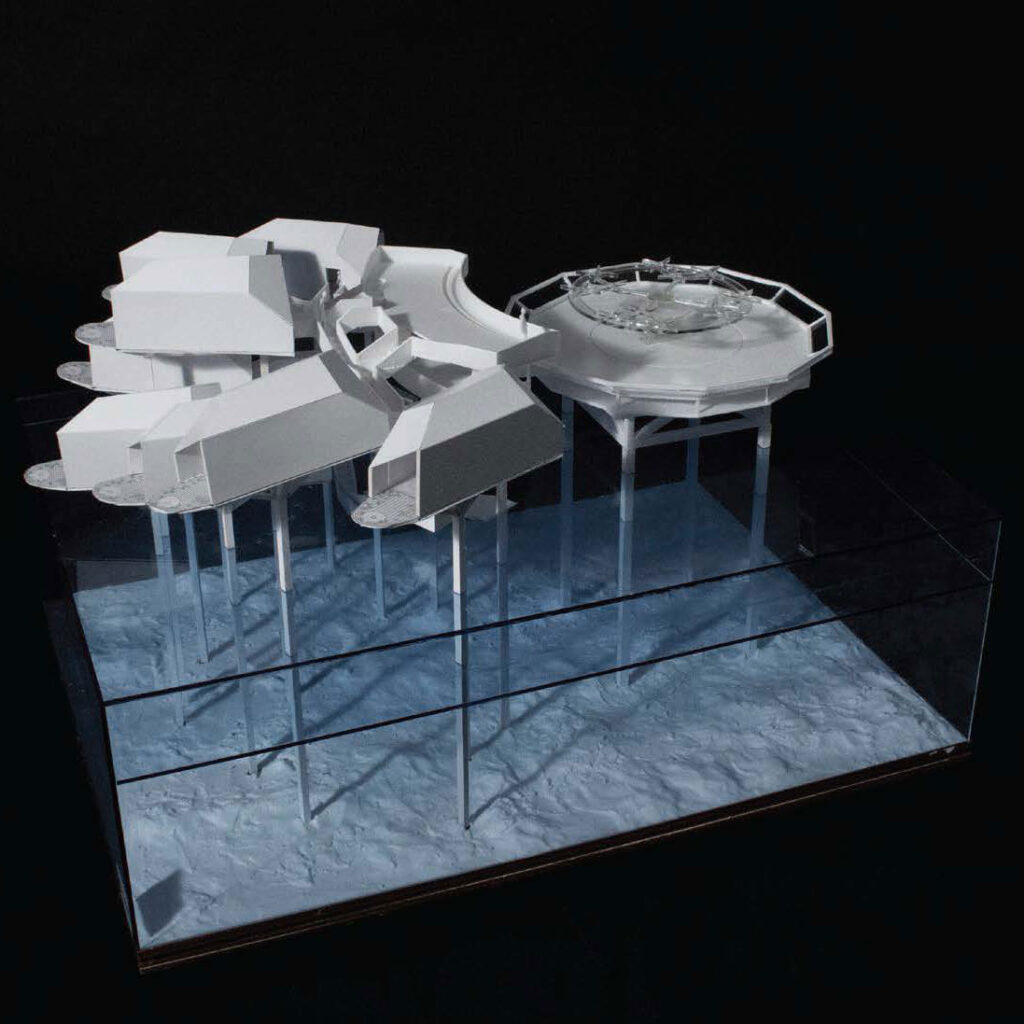
In this studio we have studied the unlikely cohabitation of the architecture of the drone port and the coastal landscape dedicated to ecology and leisure. This cohabitation need not be conflictual; indeed, we have found unexpected and productive overlaps that protect ecological continuities and provide efficient infrastructure for new systems of drone delivery.
Students investigated existing examples of droneports as instances of an emerging architectural type. These initial precedents allowed us to understand how this new building type may be organized and function as it becomes more prevalent.
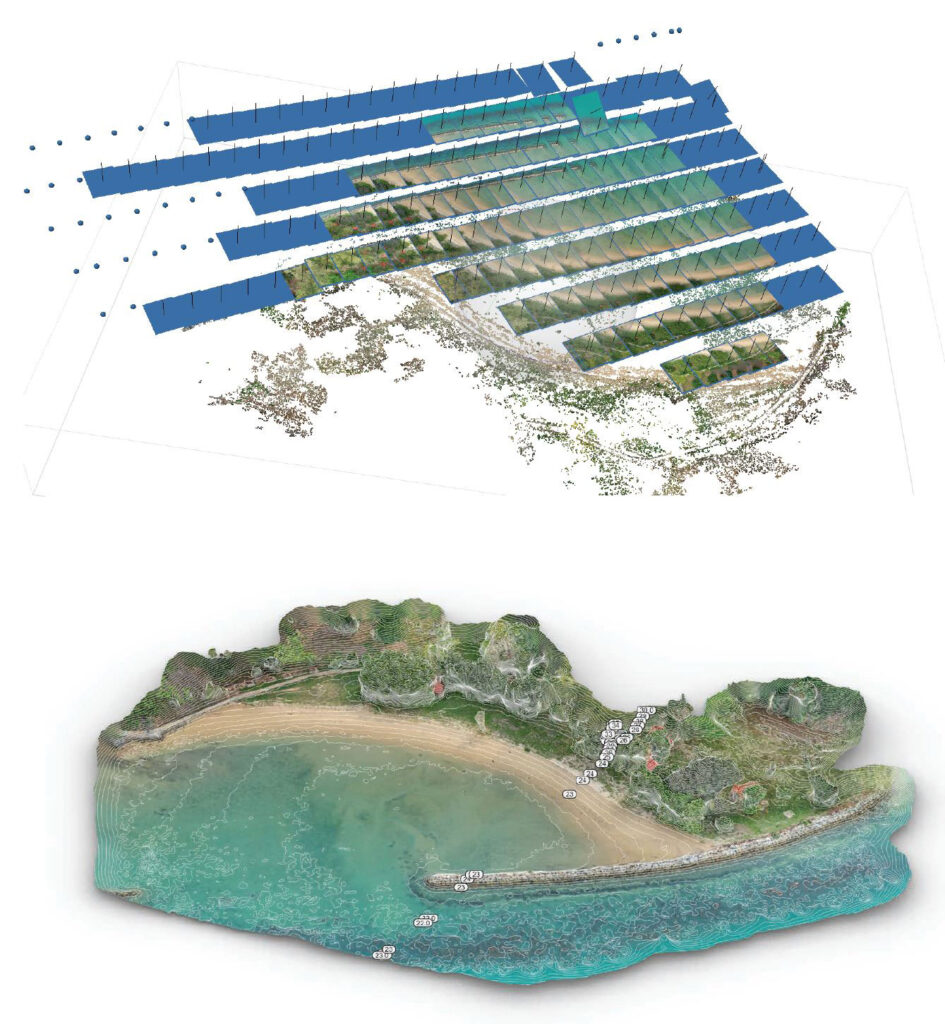
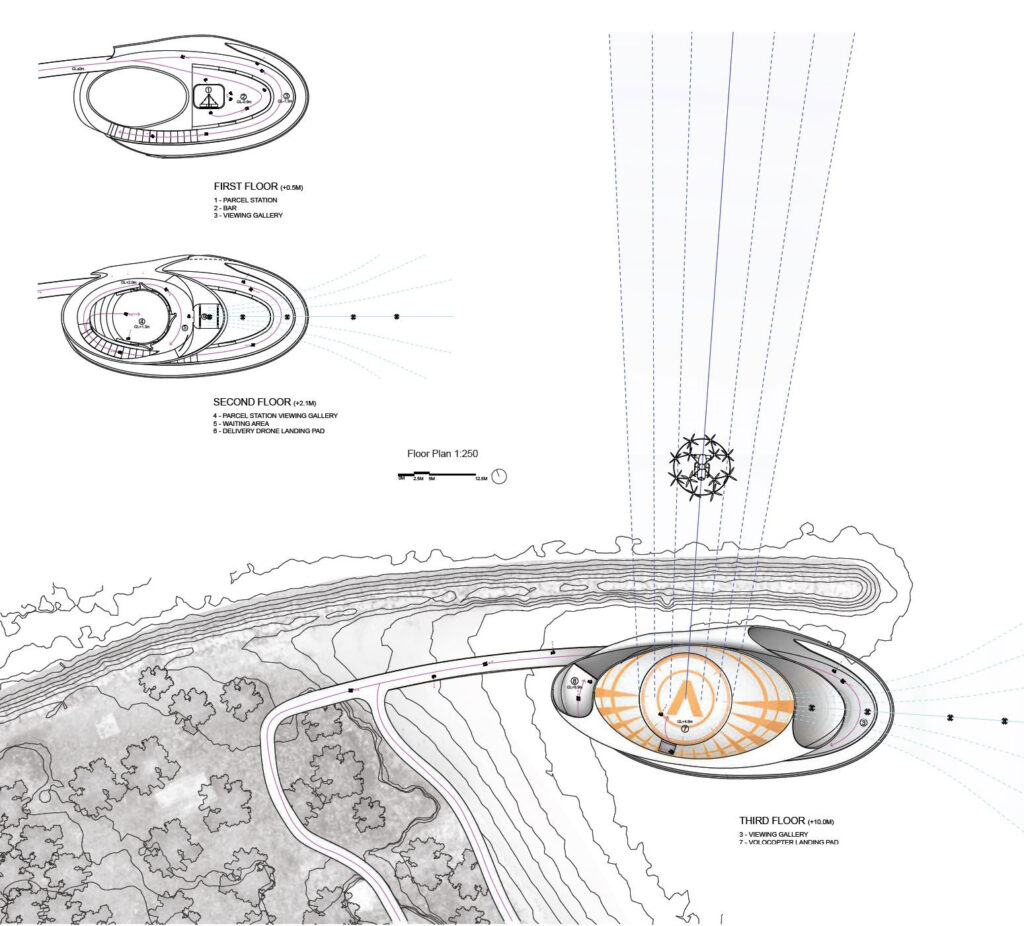
The studio project was sited on the north beach of St. John’s island. St. John’s is one of Singapore’s Southern Islands, close to Singapore’s mainland but difficult to reach due to lack of bridge or tunnel connections.

Students learned about the St. John Island site through on-site data gathering. We scanned the beach area with LiDAR at both low and high tide. An additional point-cloud of the site was created by stitching together a series of drone-generated images. Windspeed data was collected on site with a portable weather station. Additional data on island hydrology, ecology, and activities was gathered from open-data sources. Students combined these datasets into a series of maps—a starting point for the design process.
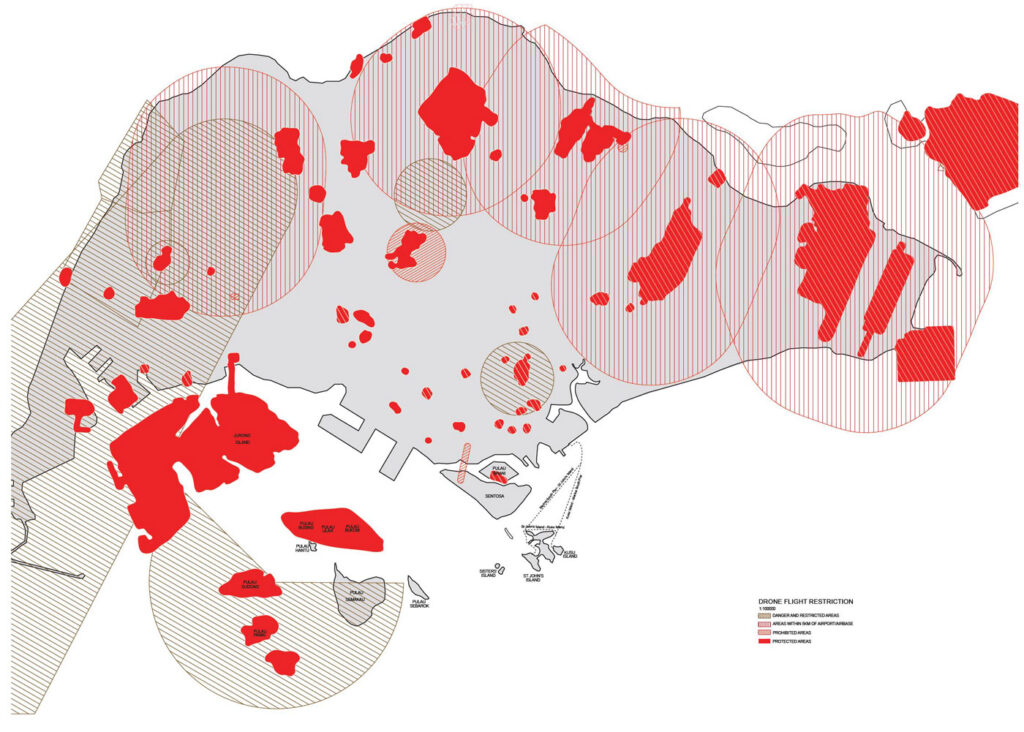
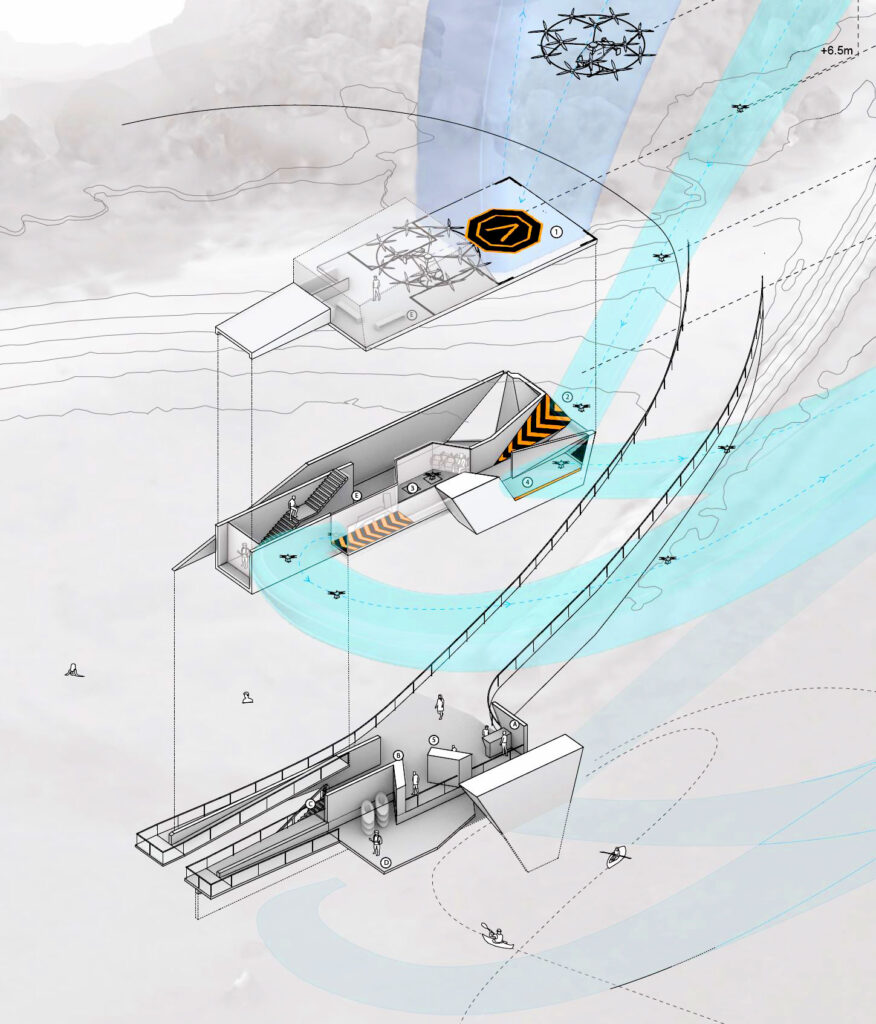
Students also worked to understand how drones and air-taxis might come to St. John’s Island through a series of air-space mappings and use-scenarios.
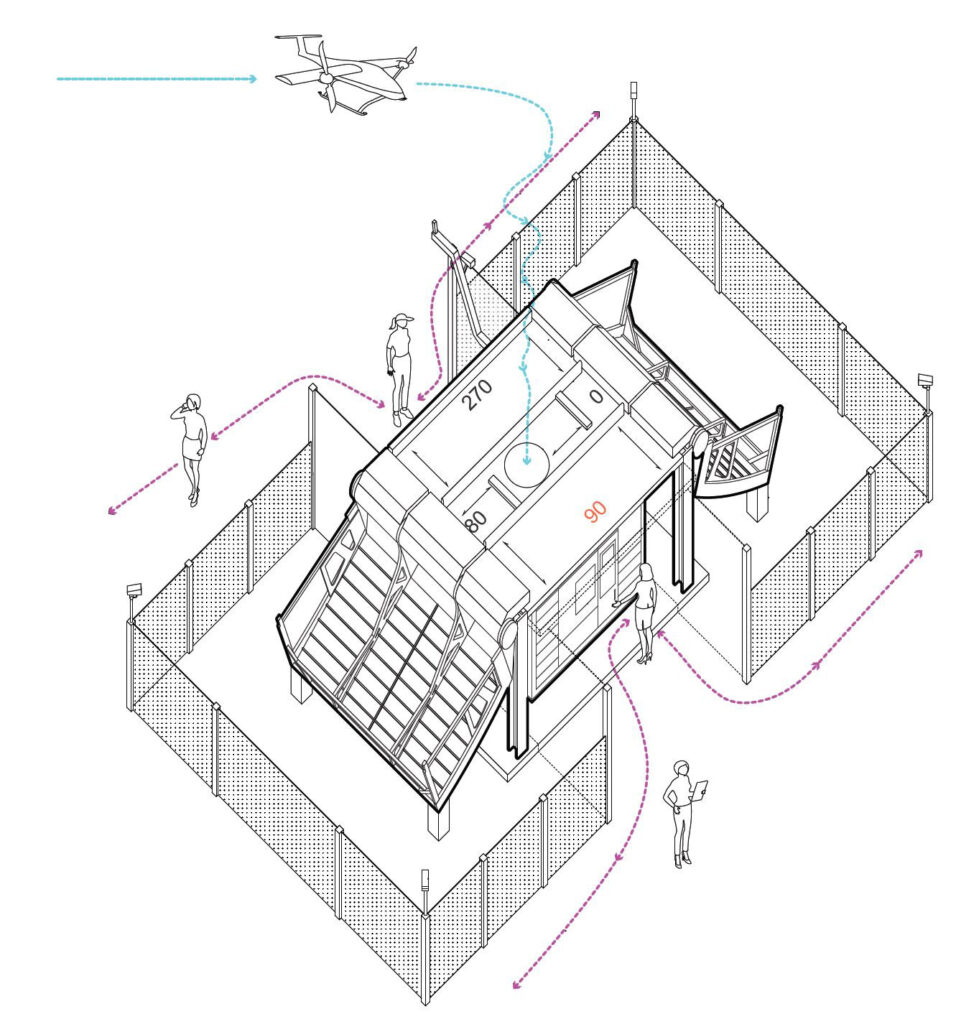
Each student project was challenged to negotiate both the flight paths of drones and air taxis with pedestrian paths through the site. This negotiation, achieved through separations in plan and section, should permit free flow of humans and aerial robots, as well as key moments of interaction between the two groups. Each student represented this overlap of circulation paths through an exploded axonometric drawing depicting architectural geometry and airspace.
Credits:
Instructor: Peter Ortner
Students: Abdul Irfan Hadi Bin Amir, Ahmad Rashidi Bin Razali, Chen Ran, Cher Jia Xi Jane, Chin Kee Ting, Han Jing, Kiang Ching, Lim Hai Heng Lester, Lim Xin Yan, Lim Ying, Naomi Marcelle Bachtiar, Ngiam Ju Jin Lucas, Song Tingxuan, Tay Boon Kiat, Wan Mengcheng, Wong Xin Jing Grace